ทุกวันนี้ในวงการอุตสาหกรรม ได้นำเครื่องจักรกลมาใช้งานแทนแรงงานคนเพื่อให้สามารถผลิตสินค้าได้อย่างรวดเร็วและแม่นยำ เครื่องจักรกลที่ใช้ในอุตสาหกรรม ที่ใช้แทนแรงงานคนประเภทหนึ่งนั้นคือ “แขนกลหุ่นยนต์”
แขนกลหุ่นยนต์เป็นหุ่นยนต์ชนิดหนึ่งที่นิยมมากในอุตสาหกรรมการผลิต เพื่อใช้ทำงานแทนแรงงานคน ตลอด24ชั่วโมง โดยเป็นงานที่ทำซ้ำๆตลอดเวลา และ ทำต่อเนื่องได้ยาวนานไม่เหน็ดเหนื่อยเมื้อยล้า
จะพบเห็นแขนกลหุ่นยนต์ได้ในอุตสาหกรรม
1.โรงงานผลิต
2.ประกอบรถยนต์
3.งานเชื่อมอุตสาหกรรม
4.งานประกอบเครื่องจักร
5.โรงงานผลิตเหล็ก
6.คลังสินค้าขนาดใหญ่
7.อุตสาหกรรมด้านอาหารและยา
ประโยชน์ที่ได้รับจากแขนกลหุ่นยนต์
1.สามารถทำงานต่อเนื่องได้ 24 ชั่วโมง ที่เป็นงานซ้ำ
2.มีความแน่นอน แม่นยำ
3.จำนวนชิ้นงานมากขึ้น
4.จำนวนการผลิตเพิ่มขึ้น
5.ประสิทธิภาพการทำงานดีขึ้น
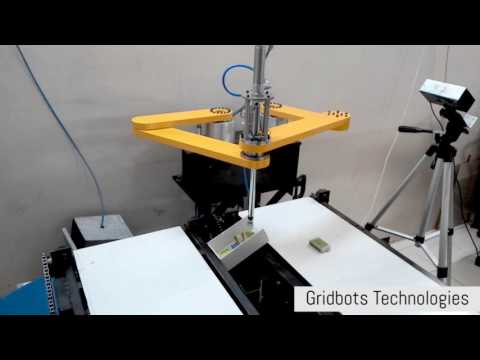
แขนกลหุ่นยนต์นั้นมีอยู่หลายประเภทแต่วันนี้ผมขอนำเสนอ แขนกลประเภท Scara Robot และคำว่า “Scara” ย่อมาจาก (Selective Compliance Assembly Robot Arm) โดยจะนำเสนอดังนี้ หลักการทำงาน,ข้อดีข้อเสีย,การประยุกต์ใช้ และ ขั้นตอนการออกแบบทั้ง 3 แบบด้วย Autocad คือ 1.Orthographic 2.Isometric 3.3D Model
หลักการทำงาน
หุ่นยนต์ SCARA จะลักษณะแกนที่ 1 (เอว) และ แกนที่ 3 (ข้อศอก) หมุนรอบแกนแนวตั้ง และ แกนที่ 2 จะมีลักษณะการเคลื่อนที่ขึ้นลง (จะเคลื่อนที่รวดเร็วตามแนวระนาบ และ ความแม่นยำสูง)


ข้อดี
1.สามารถเคลื่อนที่ได้รวดเร็ว ตามแนวระนาบและขึ้นลง
2.มีความแม่นยำสูง
ข้อเสีย
1.มีพื้นที่ทำงานจำกัด
2.ไม่สามารถหมุน(rotation) ในลักษณะมุมต่างๆได้
3.สามาถยกน้ำหนักได้ไม่มากนัก
การประยุกต์ใช้งาน
เนื่องจากเคลื่อนที่ในแนวระนาบและขึ้นลงได้รวดเร็ว จึงเหมาะสมกับงานประกอบชิ้นส่วนทางอิเล็กทรอนิกส์,งานบรรจุภัณฑ์ และ งานตรวจสอบ ซึ่งต้องการความรวดเร็วและเคลื่อนที่ไม่ต้องการการหมุนมากนัก



ขั้นตอนการออกแบบทั้ง 3 แบบด้วย Autocad
1.Orthographic
2.Isometric
3.3D Model

(หมายเหตุ : มีการเปลี่ยนแปลงสเกลในบางส่วนเพื่อให้ได้ภาพที่เหมาะสมมากขึ้น)


1.Orthographic
ขั้นตอนการทำ
เริ่มแรกให้ทำการเปิดโปรแกรม AutoCAD ขึ้นมาหลังจากเปิดแล้ว
ให้ไปที่ NEW –> แล้วเลือก Manufacturing Metric.dwt ![]()
แล้วจะมีหน้าตาเป็นแบบนี้

หลังจากได้แบบนี้แล้วมาเริ่มทำกันเลย(ขั้นตอนที่กล่าวไปใช่ในทุกแบบ 3 แบบ)
โดยเริ่มแรกเรก ให้เราใช้คำสั่ง Line ในการวาดเส้นต่างๆๆ

โดยเริ่มแรกเราจะทำการสร้างส่วน TOP ตามแบบที่ไว้ โดยเริ่มจากฐานหุ่นยนต์ก่อน(สามารถลากเส้นไปเลย หรือ พิมพ์ @ ตามด้วยความยาวเส้น < ตามด้วยองศา)

เมื่อได้ฐานแล้วเรามาทำส่วนแขนต่อโดย สร้างวงกลมจาก คำสั่ง Circle


หลังจากนั้นลากเส้นตามแบบ แล้วลบเส้นที่ไม่ใช้ด้วยคำสั่ง Trim

วาดเส้นตามแบบก็จะได้รูป TOP ดังนี้

Front view และ Side view ก็ใช้คำสั่งเหมือนกันจะได้รูปออกมาดังนี้

เส้นบอกขนาดใช้คำสั่ง Dimension โดยเราจะใช้การวัดแต่ละประเภทตามสเกลที่กำหนดมา หลังจากวัดเสร็จให้กด Dimension ข้างบนเลือก Oblique ปรับทิศทางในเหมาะสม (ใช้ในสำหรับ Orthographic และ Isometric เพื่อหาขนาดต่างๆ)
จะได้รูปตามแบบที่ให้ไว้ดังนี้

(เนื่องจากรูปมีขนาดสเกลที่ใหญ่จำเป็นต้องใช้การย่อเอามาใส่ Title Block อีกที)
วีดีโอการทำ

(ขอโทษเรื่องเสียงเบาด้วยนะครับ)
2.Isometric
เริ่มมาให้พิมพ์ sn จะขึ้น Snap แล้วพิมพ์ S เลือก Isometric แล้วกด Enter

ใช้คำสั่ง Line,Trim เหมือน Orthographic แต่ส่วนที่ต่าง คือคำสั่ง Circle
โดยเริ่มแรกให้ปรับมุมตามที่เราใช้ โดยพิมพ์ ISOPLANE ไปเลือกมุมที่ใช้ ในที่นี้ใช้มุม TOP
แล้วหลังจากนั้น ให้กดใช้ Ellipse,Axis,End แล้วเลือกเป็น ISOCIRCLE

แล้วให้ทำการวาดตามแบบที่ให้ไว้
จะได้รูปตามแบบที่ให้ไว้ดังนี้

(เนื่องจากรูปมีขนาดสเกลที่ใหญ่จำเป็นต้องใช้การย่อเอามาใส่ Title Block อีกที)
วีดีโอการทำ

(ขอโทษเรื่องเสียงเบาด้วยนะครับ)
3.3D Model
ในส่วน 3D นั้นเราจำเป็นต้องสร้างรูป 2d อยู่ 3 อย่างตามแบบ คือ ส่วนฐาน กับ ส่วนแขนทั้ง2ขนาด
หลังจากที่เราสร้างแล้วในรูป 2D ให้กดไปที่ Home แล้วกด presspull ในการดึงให้เกิดภาพ 3D ขึ้นมา
จากนั้นเราเปลี่ยนจากมุมมอง 2D Wiretrame เป็น Realistic เราจะเห็นเป็นรูป 3D ขึ้นมา
เมื่อเราได้ส่วนต่างๆ ครบแล้วให้เราทำการ Move แล้วจะเจอเส้นที่เราสร้างไว้ให้ทำการลบเหลือแต่ 3D ที่เราสร้างไว้
จากนั้นให้เราทำการ รวมร่างส่วนต่างๆเข้าด้วยกัน โดยเอามาหมุนแกนต่างๆให้ติดกัน
เมื่อติดกันหมดแล้วให้เราใช้คำสั่ง Union อยู่ที่ Solid ไปที่ Union และกดเลือกทุกส่วนทำให้ส่วนต่างๆรวมเป็นก้อนเดียวกัน
(ในส่วนรูตรงปลายแขนนั้นให้ Presspull ก่อนแล้วหลังจากนั้นใช้คำสั่ง Subtract อยู่ที่ Solid
ไปที่ Subtract แล้วกดเลือกส่วนที่เราจะเอาและไม่เอา)
หลังจากนั้นใช้คำสั่ง materials เพื่อเปลี่ยนสีตามใจชอบ

จะได้รูปตามแบบที่ให้ไว้เป็นดังนี้

(เนื่องจากรูปมีขนาดสเกลที่ใหญ่จำเป็นต้องใช้การย่อเอามาใส่ Title Block อีกที)
วีดีโอการทำ

(ขอโทษเรื่องเสียงเบาด้วยนะครับ)
โปแกรมที่ใช้
AutoCAD 2017
QuickTime Player (บันทึกภาพและเสียง)
Imovie (ตัดต่อ)
PhotoScape X (ทำรูปหน้าปก)
Google Drive : https://drive.google.com/drive/folders/0B_lykFnoYNkQT25KX3YzdG0ySW8?usp=sharing
แหล่งอ้างอิง
http://www.gridbots.com/rapi_mov.html ต้นแบบ SCARA Robot
http://www.applicadthai.com/articles/หุ่นยนต์อุตสาหกรรม-industrial-robot-type/ ข้อมูลเกี่ยวกับหุ่นยนต์ชนิดต่างๆ
http://www.tpa.or.th/writer/read_this_book_topic.php?bookID=1004&pageid=3&read=true&count=true
ข้อมูลแขนกลโรงงานอุตสาหกรรม
https://unsplash.com รูปหน้าปก(Free Photo)
